Creating DC motor control by Ultrasonic Sensor program using Arduino UNO
Required Components
- Ultrasonic sensor board -1 no
- Arduino Uno board -1 no
- DC Motor -1 no
- 12V Battery -1 no
- Data Cable -1 no
- Connecting Wires -8 no
- DC motor driver(L298N) -1 no
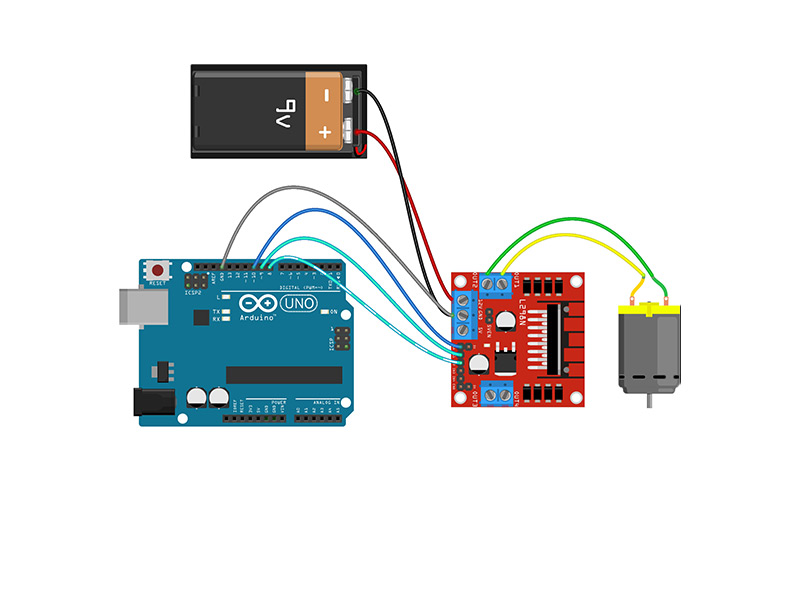
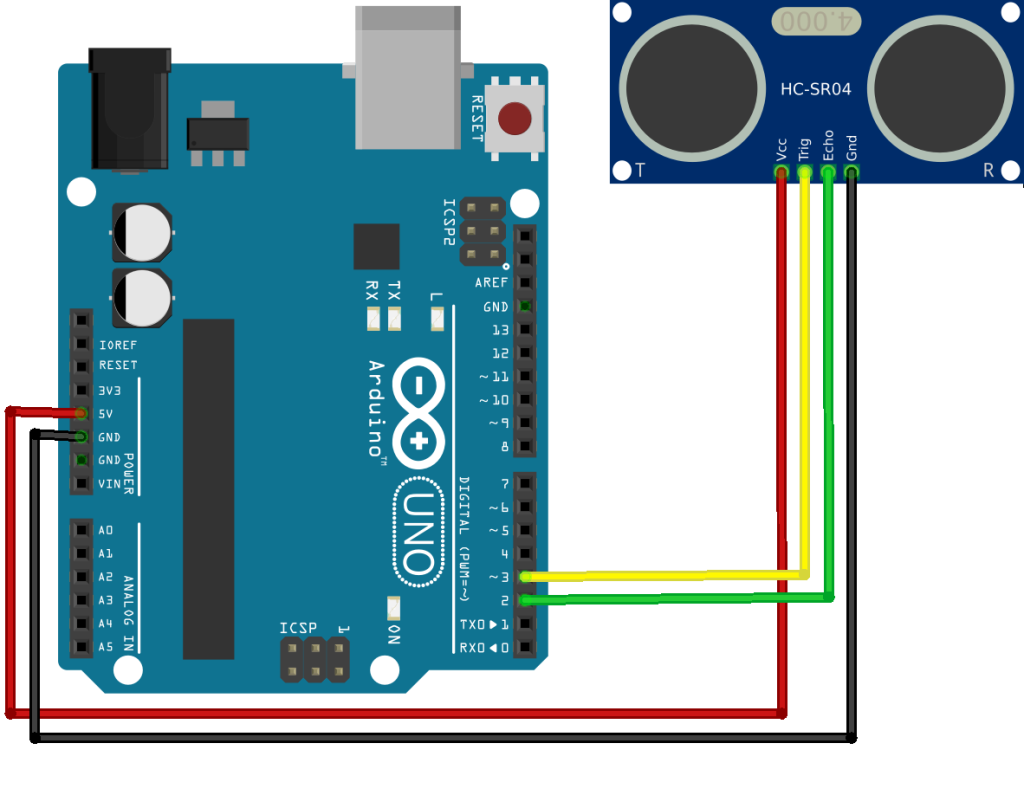
Circuit
Steps
- Make sure the components are working properly.
- Ultrasonic Sensor board VCC, GND connected to 5V, GND of Arduino Uno Board.
- Connect Ultrasonic sensor Board echo, trigger pin to the Arduino Uno Board 2, 3 pin.
- Connect the ENA, IN1, IN2 pins to the Arduino Uno board pins 10, 8, 9 properly.
- Connect DC motor pins to DC motor driver output pins.
- Connect 12V battery to DC motor driver.
- Check the Arduino program.
- Check the Circuit Connections.
- Run the Arduino program.
Arduino Program
#define echopin 2
#define trigpin 3
long duration;
int distance;
int motorpin1 = 8;
int motorpin2 = 9;
int enpin1 = 10;
void setup()
{
pinMode(trigpin, OUTPUT);
pinMode(echopin, INPUT);
Serial.begin(9600);
Serial.println("Ultrasonic Sensor HC-SR04 Test");
Serial.println("with Arduino UNO R3");
pinMode(motorpin1, OUTPUT);
pinMode(motorpin2, OUTPUT);
pinMode(enpin1, OUTPUT);
analogWrite(enpin1,70);
}
void loop()
{
digitalWrite(trigpin,LOW);
delay(2000);
digitalWrite(trigpin,HIGH);
delay(5000);
digitalWrite(trigpin,LOW);
duration = pulseIn(echopin,HIGH);
distance = duration * 0.034 / 2;
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
if(distance > 20)
{
forward();
delay(1000);
}
else if(distance <= 20)
{
stop();
delay(1000);
}
}
void stop ()
{
digitalWrite(motorpin1,LOW);
digitalWrite(motorpin2,LOW);
}
void forward()
{
digitalWrite(motorpin1,HIGH);
digitalWrite(motorpin2,LOW);
}
Usage
- Robot
vehicles
- Defence
vehicle
Projects
- Ball picking robot