Ball collecting robot is a mobile controlled wheeled robot which can be used to collect balls in a playing area. This is a prototype project which will be useful to learn about mobile robots. This concept can be extended to build fully functional ball collecting robot.
Component Required
- Arduino Nano
- Bluetooth
- 12V DC Motors (2)
- Dc Motor Driver
- 12V battery
- Servo Motor
- Cables & Wires
- Robot Wheels
- Robot Gripper
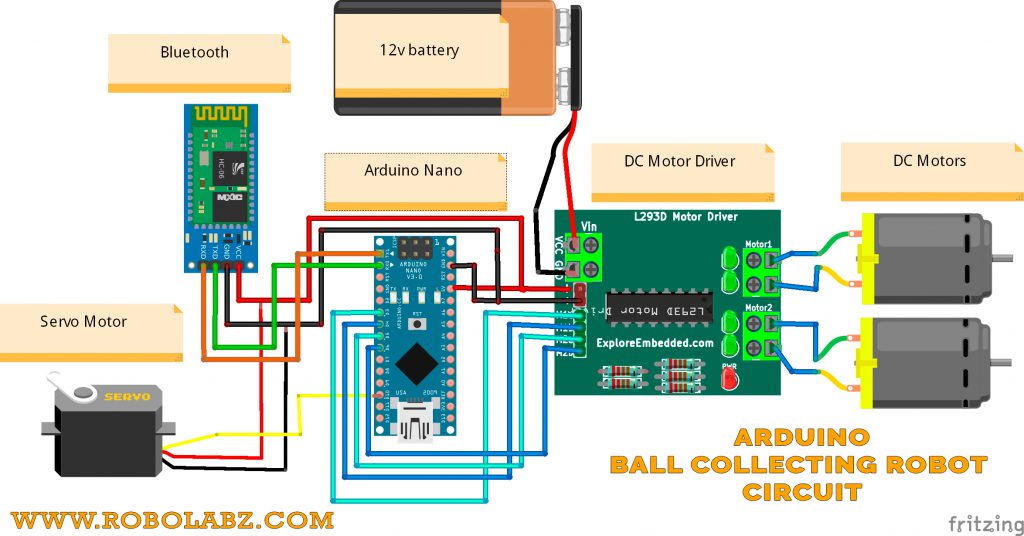
Circuit Diagram
Steps
1 :Connect the DC Motors with DC Motor Drive
2: Connect the DC motor drive OUTPUT Pins with Arduino Nano Pins
Drive Pins Arduino Nano
1A D3
1B D4
2A D5
2B D63: Connect the Servo Motor with Arduino Nano
wires Pins
Red 5V
Black GND
Yellow D104 : Connect the Bluetooth with Arduino Nano
Bluetooth Arduino Nano
5V 5V
GND GND
RX TX
TX RX5 : Check the Connection once
6 : Upload the arduino program
7 : Install the mobile application in the mobile device.
8: Test the robot with mobile application
Arduino Program
#include <AFMotor.h>
#include <Servo.h>
// Check the motor driver datasheet for motor pin connections
AF_DCMotor rm(1, MOTOR12_64KHZ); // Right motor
AF_DCMotor lm(4, MOTOR34_64KHZ); // Left motor
Servo grServo; // Servo motor for gripper
byte incomingByte ;
void setup()
{
Serial.begin(9600);
// Set motors speed
rm.setSpeed(200);
lm.setSpeed(200);
rm.run(RELEASE);
lm.run(RELEASE);
grServo.attach(10); // Attach gripper
}
void loop()
{
if (Serial.available() > 0) {
incomingByte = Serial.read(); // Read the input character from bluetooth serial input buffer
if (incomingByte == 'A')
{
grServo.write(120); // Gripper Open Position
}
else if (incomingByte =='B')
{
grServo.write(180); // Gripper Close Position
}
else if (incomingByte == 'C')
{
rm.run(FORWARD); // Run both motors in forward direction
lm.run(FORWARD);
}
else if (incomingByte == 'D')
{
rm.run(BACKWARD); // Run both motors in backward direction
lm.run(BACKWARD);
}
else if (incomingByte == 'E')
{
rm.run(BACKWARD); // Turning Left. Run right motor in backward direction and left motor in forward direction
lm.run(FORWARD);
}
else if (incomingByte == 'G')
{
rm.run(FORWARD); // Turning Right. Run right motor in forward direction and left motor in backward direction
lm.run(BACKWARD);
}
else if (incomingByte == 'F')
{
rm.run(RELEASE); // Stop both motors
lm.run(RELEASE);
}
}
delay(20);
}
Get the motor driver library from https://github.com/adafruit/Adafruit-Motor-Shield-library
Get the code from github : https://github.com/robolabz/ballcollectingrobot
For robot base and gripper design files and mobile application, contact “info at robolabz.com”