L298N Motor Driver ஐ பயன்படுத்தி 2 DC மோட்டார்களை கட்டுப்படுத்துவது.
Required Components
- L298N Motor Driver Module -1 no
- Arduino UNO -1 no
- DC Motor(gear) -2 no
- 12V Battery -1 no
- Data Cable -1 no
- Connecting Wires -4 no
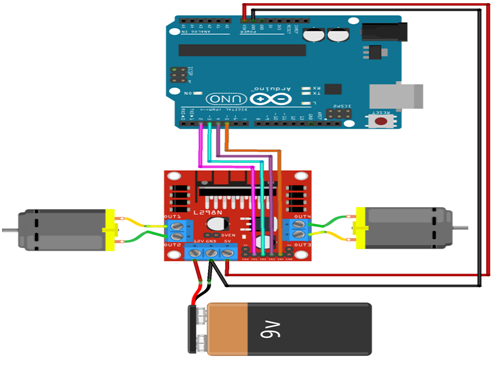
Circuit
Steps
- நாம் பயன்படுத்தும் உபகரணங்கள் சரியாக வேலை செய்கிறதா என்பதை உறுதி செய்து கொள்ளவும்.
- மோட்டார் Driver போர்டு உடன் +12V battery இணைக்க வேண்டும்.
- +12V பேட்டரி இணைப்புகளை சரியாகவும் கவனமாகவும் இணைக்க வேண்டும்.
- மோட்டார் Driver போர்டு ENA, IN1, IN2, IN3, IN4, ENB பின்களை Arduino பின்களான 4,2,3,5,6,7 உடன் இணைக்க வேண்டும்.
- மோட்டார் Driver போர்டு OUTPUT பின்களை DC மோட்டார் பின்களுடன் இணைக்க வேண்டும்.
- மோட்டார் Driver போர்டு gnd ஐ Arduino UNO board gnd உடன் இணைக்க வேண்டும்.
- Arduino program ஐ சரி பார்க்க வேண்டும்.
- மின்சுற்றை சரி பார்க்க வேண்டும்.
- Arduino program ஐ ரன் செய்ய வேண்டும்.
Arduino Program
int motor1pin1 = 2;
int motor1pin2 = 3;
int enPin1 = 4;
int motor2pin1 = 5;
int motor2pin2 = 6;
int enPin2 = 7;
void setup()
{
pinMode(motor1pin1, OUTPUT);
pinMode(motor1pin2, OUTPUT);
pinMode(enPin1, OUTPUT);
digitalWrite(enPin1, HIGH);
pinMode(motor2pin1, OUTPUT);
pinMode(motor2pin2, OUTPUT);
pinMode(enPin2, OUTPUT);
digitalWrite(enPin2, HIGH);
}
void loop()
{
digitalWrite(motor1pin1, HIGH);
digitalWrite(motor1pin2, LOW);
digitalWrite(motor2pin1, HIGH);
digitalWrite(motor2pin2, LOW);
delay(1000);
digitalWrite(motor1pin1, LOW);
digitalWrite(motor1pin2, HIGH);
digitalWrite(motor2pin1, LOW);
digitalWrite(motor2pin2, HIGH);
delay(1000);
}
Usage
- நேரோட்ட மின்சார
இயக்கி(Drive
DC motors)
- படிநிலை இயக்கி(Drive Stepping
motors)
- ரோபாட்டிக்ஸ்(In Robotics)