Ultrasonic sensor உடன் இணைக்கப்பட்ட DC மோட்டாரை Arduino UNO உதவியுடன் கட்டுப்படுத்துவது.
Required Components
- Ultrasonic sensor board -1 no
- Arduino Uno board -1 no
- DC Motor -1 no
- 12V Battery -1 no
- Data Cable -1 no
- Connecting Wires -8 no
- DC motor driver(L298N) -1 no
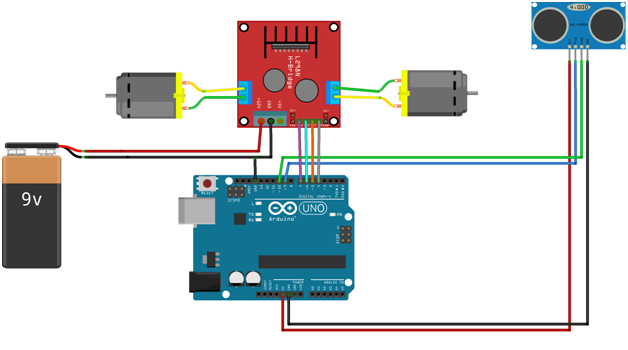
Circuit
Steps
- நாம் பயன்படுத்தும் உபகரணங்கள் சரியாக வேலை செய்கிறதா என்பதை உறுதி செய்து கொள்ளவும்.
- Ultrasonic sensorல் உள்ள ECHO மற்றும் TRIG பின்களை Arduino வில் உள்ள 9 மற்றும் 10 பின்களுடன் இணைக்க வேண்டும்.
- +5V மற்றும் ground சப்ளையை DC மோட்டார் மற்றும் Ultrasonic Sensor உடன் இணைக்க வேண்டும்.
- DC மோட்டார் மற்றும் Ultrasonic Sensor ஐ Bread board உடன் இணைக்க வேண்டும்.
- Resistor ஐ பயன்படுத்தி DC மோட்டாரை Bread boardல் இணைக்க வேண்டும்.
- Arduino UNO வின் 11 வது பின்னை DC மோட்டார் உடன் இணைக்க வேண்டும்.
- Arduino program ஐ சரி பார்க்க வேண்டும்.
- மின்சுற்றை சரி பார்க்க வேண்டும்.
- Arduino program ஐ ரன் செய்ய வேண்டும்.
Arduino Program
#define echopin 2
#define trigpin 3
long duration;
int distance;
int motorpin1 = 10;
int motorpin2 =11;
int enpin1 = 9;
void setup()
{
pinMode(trigpin, OUTPUT);
pinMode(echopin, INPUT);
Serial.begin(9600);
Serial.println("Ultrasonic Sensor HC-SR04 Test");
Serial.println("with Arduino UNO R3");
pinMode(motorpin1, OUTPUT);
pinMode(motorpin2, OUTPUT);
pinMode(enpin1, OUTPUT);
analogWrite(enpin1,70);
}
void loop()
{
digitalWrite(trigpin,LOW);
delay(2000);
digitalWrite(trigpin,HIGH);
delay(5000);
digitalWrite(trigpin,LOW);
duration = pulseIn(echopin,HIGH);
distance = duration * 0.034 / 2;
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
if(distance > 20)
{
forward();
delay(1000);
}
else if(distance <= 20)
{
stop();
delay(1000);
}
}
void stop ()
{
digitalWrite(motorpin1,LOW);
digitalWrite(motorpin2,LOW);
}
void forward()
{
digitalWrite(motorpin1,HIGH);
digitalWrite(motorpin2,LOW);
}
Usage
- ரோபோ வாகனங்கள்(Robot vehicles)
- பாதுகாப்பு வாகனம்(Defence vehicle)
Projects
- பந்து எடுக்கும் ரோபோ(Ball picking robot)