Arduino UNOவை பயன்படுத்தி servoமோட்டாரின் நிலையை கட்டுப்படுத்துவது.
Required Components
- Servo motor(5V) -1 no
- Arduino board -1 no
- Connecting wires -1 set
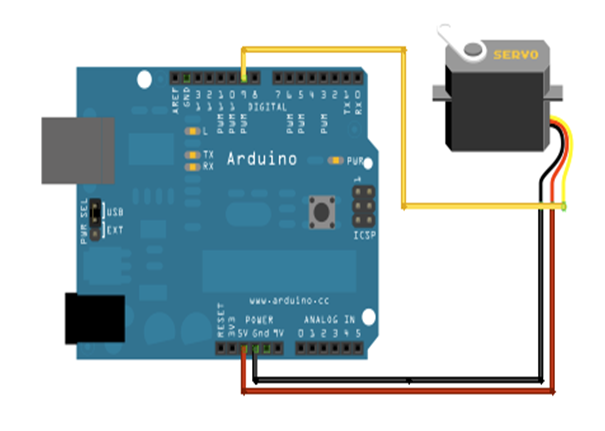
Circuit
Steps
- நாம் பயன்படுத்தும் உபகரணங்கள் சரியாக வேலை செய்கிறதா என்பதை உறுதி செய்து கொள்ளவும்.
- 5V sweep servo மோட்டார் பயன்படுத்தப்படுகிறது.
- Servo மோட்டாருக்கு மூன்று இணைப்புகள் உள்ளன, அதில் ஒன்று data pin, +5v மற்றும் ground.
- Arduino 9 ஆவது இணைப்பை நேரடியாக மோட்டார் உடன் இணைக்க வேண்டும்.
- மோட்டாரின் நடு இணைப்பை +5V உடன் இணைக்க வேண்டும்.
- மோட்டாரின் கடைசி இணைப்பை Ground உடன் இணைக்க வேண்டும்.
- ஒவ்வொரு முறையும் மோட்டார் சுழலும்போது +90 அல்லது -90 இருக்குமாறு Program ஐ எழுத வேண்டும்.
- Arduino program வை சரி பார்க்க வேண்டும்.
- மின்சுற்றை சரி பார்க்க வேண்டும்.
- Arduino program வை ரன் செய்ய வேண்டும்.
Arduino Program
#include <Servo.h>
Servo myservo;
int pos=0;
int stepdelay=10;
void setup( )
{
myservo.attach(9);
}
void loop( )
{
moveFromTo(0,90);
delay (1000);
moveFromTo(90,180);
delay(1000);
moveFromTo(180,90);
delay (1000);
moveFromTo(90,0);
delay (1000);
}
void moveFromTo(int From, int To)
{
if (From <=To)
{
for (pos=From; pos <=To; pos +=1)
{
myservo.write(pos);
delay( stepdelay);
}
}
else
{
for(pos=From; pos >=To;pos -=1)
{
myservo.write(pos);
delay( stepdelay);
}
}
}
Usage
- கன்வேயர் பெல்ட் (Conveyor Belts).
- கேமரா ஆட்டோ ஃபோகஸ் (Camera Auto Focus).
- சூரிய கண்காணிப்பு அமைப்பு (Solar Tracking System).
- மெட்டல் கட்டிங் & மெட்டல் ஃபார்மிங் இயந்திரம்(Metal Cutting & Metal Forming Machines).
- ஆண்டெனா நிலைப்படுத்தல் (Antenna Positioning).
- அச்சகங்கள்/அச்சுப்பொறிகள் (Printing Presses/Printers).
Projects
- Robot-Arm.
- Sensor dustbin.