Ball collecting robot is a mobile controlled wheeled robot which can be used to collect balls in a playing area. This is a prototype project which will be useful to learn about mobile robots. This concept can be extended to build fully functional ball collecting robot.
Component Required
Arduino Nano
Bluetooth
12V DC Motors (2)
Dc Motor Driver
12V battery
Servo Motor
Cables & Wires
Robot Wheels
Robot Gripper
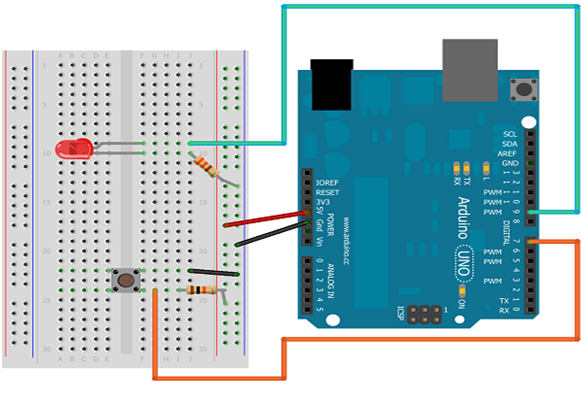
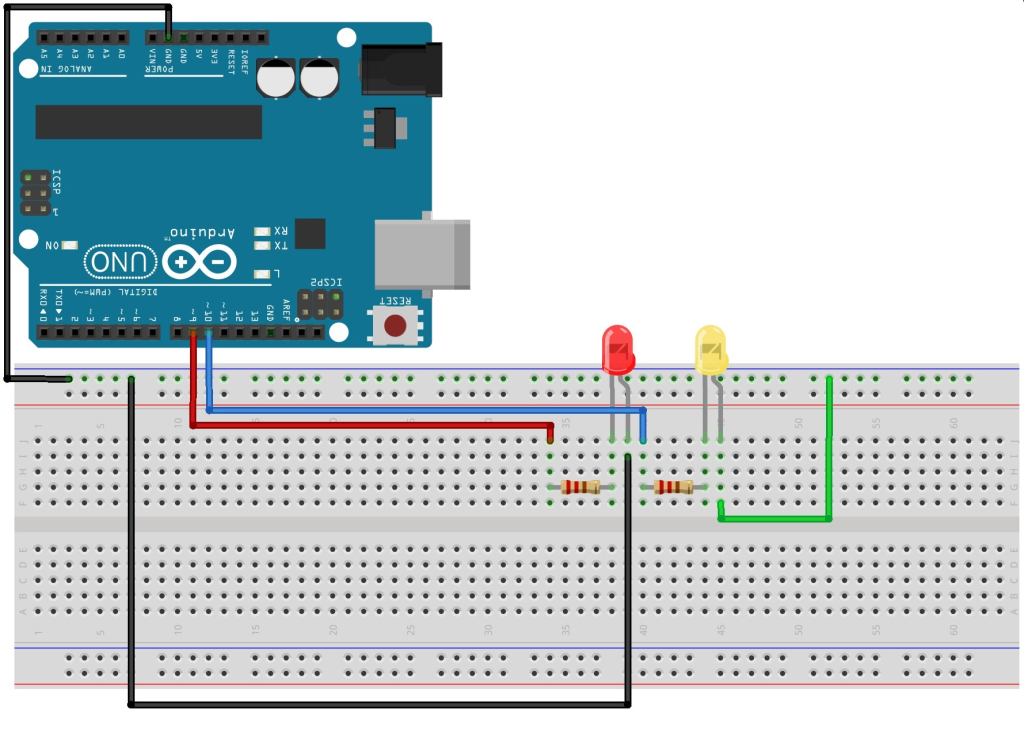
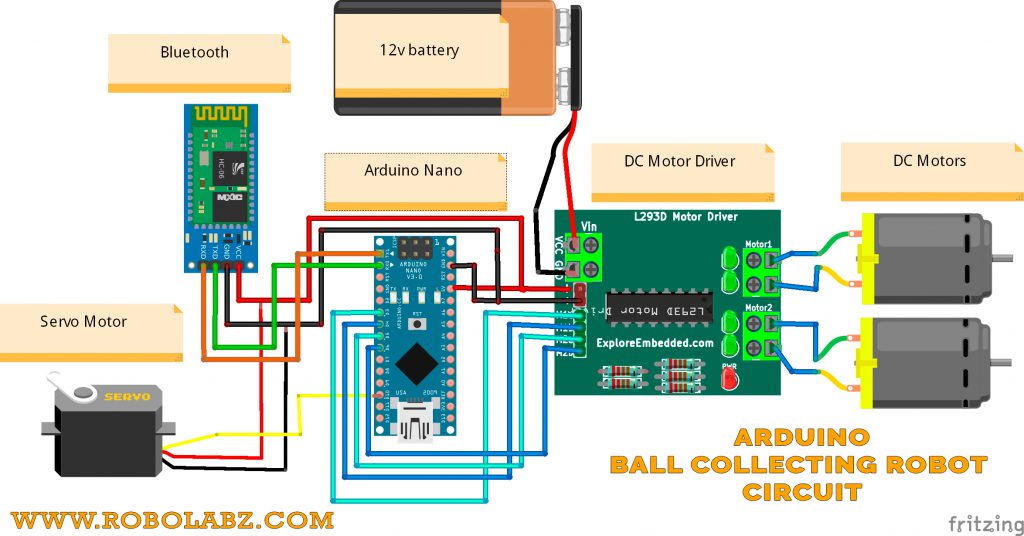
Circuit Diagram
Steps
1 :Connect the DC Motors with DC Motor Drive
2: Connect the DC motor drive OUTPUT Pins with Arduino Nano Pins
Drive Pins Arduino Nano
1A D3
1B D4
2A D5
2B D6
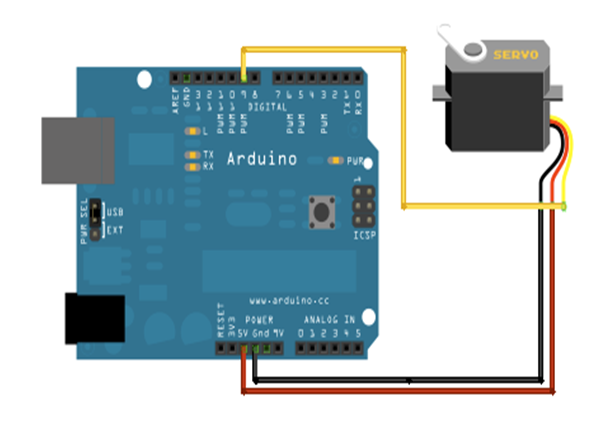
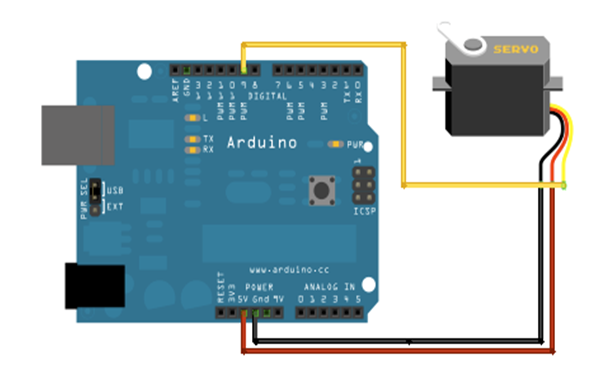
3: Connect the Servo Motor with Arduino Nano
wires Pins
Red 5V
Black GND
Yellow D10
4 : Connect the Bluetooth with Arduino Nano
Bluetooth Arduino Nano
5V 5V
GND GND
RX TX
TX RX
5 : Check the Connection once
6 : Upload the arduino program
7 : Install the mobile application in the mobile device.
8: Test the robot with mobile application
Arduino Program
#include <AFMotor.h>
#include <Servo.h>
// Check the motor driver datasheet for motor pin connections
AF_DCMotor rm(1, MOTOR12_64KHZ); // Right motor
AF_DCMotor lm(4, MOTOR34_64KHZ); // Left motor
Servo grServo; // Servo motor for gripper
byte incomingByte ;
void setup()
{
Serial.begin(9600);
// Set motors speed
rm.setSpeed(200);
lm.setSpeed(200);
rm.run(RELEASE);
lm.run(RELEASE);
grServo.attach(10); // Attach gripper
}
void loop()
{
if (Serial.available() > 0) {
incomingByte = Serial.read(); // Read the input character from bluetooth serial input buffer
if (incomingByte == 'A')
{
grServo.write(120); // Gripper Open Position
}
else if (incomingByte =='B')
{
grServo.write(180); // Gripper Close Position
}
else if (incomingByte == 'C')
{
rm.run(FORWARD); // Run both motors in forward direction
lm.run(FORWARD);
}
else if (incomingByte == 'D')
{
rm.run(BACKWARD); // Run both motors in backward direction
lm.run(BACKWARD);
}
else if (incomingByte == 'E')
{
rm.run(BACKWARD); // Turning Left. Run right motor in backward direction and left motor in forward direction
lm.run(FORWARD);
}
else if (incomingByte == 'G')
{
rm.run(FORWARD); // Turning Right. Run right motor in forward direction and left motor in backward direction
lm.run(BACKWARD);
}
else if (incomingByte == 'F')
{
rm.run(RELEASE); // Stop both motors
lm.run(RELEASE);
}
}
delay(20);
}